Dinâmica de forças
Para acessar outros textos e as referências, clique aqui.
MATOS, E. E. S. LUDI: um framework para desambiguação lexical com base no enriquecimento da semântica de frames. 200 p. Tese (Doutorado), Universidade Federal de Juiz de Fora, 2014.
Para Talmy (2000), uma característica fundamental da linguagem é que ela possui dois subsistemas: o subsistema gramatical e o subsistema lexical. Enquanto o subsistema gramatical é restrito por regras e representa a “estrutura” conceptual, o subsistema lexical é aberto, não restrito e é responsável pelo “conteúdo” conceptual.
O modelo force dynamics (Dinâmica de Forças – DF) de Talmy faz parte deste modelo cognitivo mais abrangente, que representa a organização dos conceitos especificados na estrutura gramatical. O modelo DF reconhece as motivações morfossintáticas e semânticas das construções causativas como provenientes do subsistema gramatical. Desta forma, a causação é colocada em paralelo com outras categorias nocionais, como aspecto/tempo, negação, número e gênero, que também tem uma representação gramatical na linguagem (TALMY, 2000, p. 410-411). Este nível de análise permite abstrações da noção fundamental de causação no mundo real para outros domínios, através de vários processos cognitivos.
A DF está relacionada a como as entidades interagem com respeito à força, o que inclui o exercício da força, a resistência a tal força, a superação de tal resistência, o bloqueio da expressão da força e a remoção de tal bloqueio. Assim, a DF compreende a expressão da força como a oposição entre entidades e os resultados de tais interações com o tempo. Isto significa que a causação é essencialmente um conceito de dinâmica de forças e a DF é uma generalização da noção tradicional de “causativo” (TALMY, 2000, p. 409). O modelo DF decompõe a noção de “causativo” em “primitivas”, para incluir as noções de “permissão”, “habilitação”, “ajuda” e “impedimento”.
Notações
O modelo DF emprega notações especializadas (Figura 58) para denotar os conceitos básicos na representação das interações na dinâmica de forças.
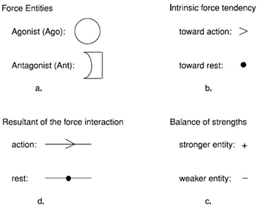
Fonte: Talmy (2000, p.414)
Na DF, duas entidades, o Agonista (AGO) e o Antagonista (ANT), interagem em relação à força. Considera-se que cada uma destas entidades tem uma tendência de força intrínseca em um dado tempo, ou em direção ao movimento ou em direção ao repouso. No entanto, para que a interação de forças seja possível, as duas entidades devem apresentar tendências opostas. O AGO e o ANT não possuem a mesma intensidade de força: um deve ser mais fraco e o outro mais forte, em um dado tempo. Na DF, o resultado da interação de forças é colocado em termos do estado do AGO em relação à força depois da interação. Em outras palavras, cada interação é iniciada com a intenção (ou o potencial) de influenciar o AGO, para que ele manifeste uma tendência de força diferente. Este objetivo é o ponto focal na expressão das interações na dinâmica de forças.
Padrões básicos de DF
A natureza do choque entre as entidades engajadas na interação de forças pode ser representada de formas distintas na DF. Os padrões demonstram, em cada caso, os estados resultantes possíveis e também fornecem acesso as informações de fundo, exibidas nas construções causativas.
Padrões Steady-State
O padrão steady-state é subjacente a todos os padrões complexos da DF na linguagem (TALMY, 2000, p. 413). A interação antre o AGO e o ANT produz um dos quatro resultados mostrados na Figura 59.
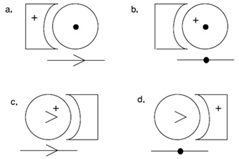
Fonte: Talmy (2000, p.415)
Os padrões na Figura 59(a) e na Figura 59(d) demonstram o que pode ser referido como “causação prototípica”. Isto envolve um “choque positivo” do ANT sobre o AGO (porque o ANT possui maior intensidade de força), o que leva o AGO, eventualmente, a umestado oposto ao seu estado original. Uma vez que a interação envolvida na Figura 59(a) e na Figura 59(d) é estável (ela continua durante uma parcela considerável de tempo), ela ilustra a chamada “causação estendida”. Assim, a situação causativa, como geralmente é definida, poderia ser representada como na Figura 59(a) e na Figura 59(d), como várias características adicionais quando necessário.
Os padrões na Figura 59(b) e na Figura 59(c), no entanto, demostram que nem todas as interações entre o AGO e o ANT resultam em uma mudança de estado do AGO.
Tais padrões ilustram o que Talmy (2000, p. 415) chama de “despite category”, onde um AGO mais forte resiste com sucesso à força do ANT e mantem seu estado original. Assim, mesmo que esta situação não seja geralmente analisada como causativa, ela está fortemente associada como a causação (especificamente a “causação falha”). As sentenças a seguir fornem exemplos destes padrões:
(a) CAUSAÇÃO: A pipa continua subindo porque o vento sopra forte.
(b) RESISTÊNCIA: O telhado continua intacto apesar do forte vento.
(c) SUPERAÇÃO: A bola continua rolando apesar da grama alta.
(d) BLOQUEIO: Os manifestantes não entraram por causa da grade de ferro cercando o prédio.
Padrões Shifiting
A dinâmica das forças também pode ser encontrada em padrões de shifting (deslocamento). Nestes padrões, a interação entre o ANT e o AGO não é estável, mas se desloca com o passar do tempo para produzir um resultado diferente. Estes padrões são de dois tipos, ilustrados na Figura 60: separação do ANT e do AGO ((a) e (b)) e introdução repentina da força do ANT no AGO ((c) e (d)).
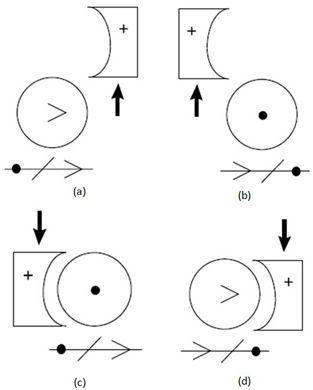
Fonte: Talmy (2000, p.418)
As setas na Figura 60(a-d) indicam os padrões de deslocamento ou movimento do ANT; as setas apontando para cima indicam a remoção da força do ANT no AGO ((a) e (b)), enquanto aquelas apontando para baixo indicam a introdução da força do ANT no AGO ((c) e (d)). Além disso, nas figuras (a) e (d), cada configuração de DF tem dois estados resultantes separados pela barra: o estado resultante na esquerda representa o resultado da interação entre o ANT e o AGO antes do deslocamento, enquanto o estado resultante na direita mostra o resultado da interação depois do deslocamento.
As figuras 60(a) e 60(b) ilustram a situação de letting (deixar), que envolve a remoção da força do ANT sobre o AGO, resultando que o AGO, eventualmente, manifeste seu estado original ou atividade (que em (a) é em direção ao movimento e em (b) em direção ao repouso). Assim, a Figura 60(a) representa onset letting of motion (início da permissão de movimento), enquanto a Figura 60(b) representa onset letting of rest (início da permissão de repouso). Deve ser ressaltado, no entanto, queapesar da remoção da força do ANT sobre o AGO, o ANT continua sendo a entidade mais forte; o estado resultante exibido pelo AGO não é necessariamente em virtude do força do AGO sozinho. Em outras palavras, em 60(a) e 60(b), o AGO pode continuar a mostrar seu estado original somente com a permissão do ANT; assim, o ANT pode ser considerado responsável pelo eventutal estado do AGO.
Por outro lado, a figura Figura 60(c) e a figura Figura 60(d) apresentam um cenário relativamente diferente. Em (c), um ANT como maior força repentinamente age sobre um AGO que está em repouso, causando o movimento do AGO. Em (d), um AGO pode ser repentinamente bloqueado por um ANT mais forte, causando uma mudança de estado do AGO. Talmy (2000, p. 418) nota que o padrão em (c) é mais associado com a categoria de causação, onde um objeto (comumente) em repouso sofre repentinamente a ação de outro entidade, resultando em uma mudança de estado do último. O padrão em (c) é referido como onset causation (início de causação), enfatizando a natureza repentina da ação do ANT. Intuitivamente, todos os padrões de causação, incluindo os padrões steady-state, devem começar como onset causation.
Domínios da DF
O modelo DF estende as interações de forças do físico para o abstrato. Talmy identifica os domínios intra-psicológico e inter-psicológico como áreas onde a dinâmica de força pode operar.
Domínio intra-psicológico
De acordo com Talmy (2000, p. 430), na linguagem as noções que são usualmente associadas com interações físicas, tais como “empurrar”, “bloquear” e “permitir” podem ser estendidas para os domínios psicológicos através de metáforas sistemáticas. O modelo DF torna possível representar as expressões de interação de forças ocorrendo dentro de uma única psique. Este domínio envolve um “self dividido” em duas entidades, as quais estão engajadas em interações de força: uma parte de “desejo” (AGO) e uma parte de “bloqueio” ou “estímulo” (ANT). As duas entidades, com quantidade de forças opostas, são parte da mesma psique.
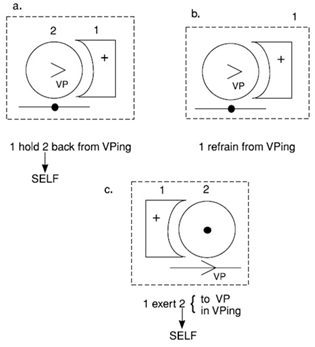
Fonte: Talmy (2000, p.431)
Como ilustrado na Figura 61(a) e na Figura 61(b), a expressão da causação intra- psicológica pode envolver três padrões diferentes. Em (a), a parte “desejo” do self dividido (AGO) é bloqueado por um ANT mais forte, que cerceia a atividade do AGO. Este padrão pode se exemplificado pela sentença (C.1).
(C.1) Ele impediu a si mesmo de responder.
Aqui, um ANT mais forte (a parte “bloqueio” do self) é expresso como o sujeito impedindo com sucesso a manifestação do AGO (expresso com o reflexivo “si mesmo”). Na Figura 61(c), no entanto, nota-se que um ANT mais forte pode agir como um estímulo sobre o AGO que está em repouso, provocando uma ação. O padrão em (b) demonstra que a causação intra-psicológica pode ser lexicalizada; as duas entidades em oposição na interação não podem ser individualmente especificadas em uma sentença, uma vez que a psique inteira deve ser expressa como sujeito. Neste padrão, as interações entre os elementos do “self dividido” são reunidas em um único item lexical. Esta é a razão de porque em (b) o AGO e o ANT não são numerados individualmente, mas a psique inteira é expressa como o ator.
Talmy (2000, p. 433) propõe que a dinâmica de força psicológicas é uma proprie- dade subjacente à todas as entidades sencientes. Ele afirma que enquanto parece que as manifestações de força das entidades (sencientes ou não sencientes) emanam da força do seus corpos físicos, em essência as entidades sencientes têm uma fonte de força renovável, a psique. Este fato é materializado em situações onde a força física do AGO, quando comparada com a força física do ANT, é muito mais fraca, mas o AGO resiste com sucesso a pressão do ANT. Por exemplo, na sentença (C.2) quando as forças do AGO (o estudante) e do ANT (os colegas) são medidas baseando-se apenas na quantidade física, o AGO é mais fraco. Assim, é possível dizer que a resistência do AGO se deve a uma fonte que é não física.
(C.2) O estudante resistiu a pressão dos colegas para fumar um cigarro.
Domínio inter-psicológico
A dinâmica de forças pode ser expressa entre duas psique distintas através da extensão metafórica dos conceitos de “empurrar” ou o exercício de “pressão” de uma entidade sobre outra. Em interações sociais, mesmo se a expressão do exercício de força por uma entidade (senciente) sobre outra não é física, a interação é ainda transmitida por itens lexicais que expressam força física, sugerindo uma relação metafórica entre os dois domínios. Na sentença (C.3), o sujeito (AGO) é concebido como estando sob a influência de uma entidade não expressa (ANT), para submeter-se a uma certa mudança de estado. Neste exemplo, a interação não é física, mas ocorre entre as psique do AGO e do ANT. Note-se, no entanto,
que a interação de forças entre psique pode envolver fases de negociação de forças (exercício, manutenção ou produção) entre as entidades em oposição. Assim, a sentença acima pode apresentar as fases ilustradas na Figura 62.
(C.3) Ele está sob muita pressão para testemunhar na corte.
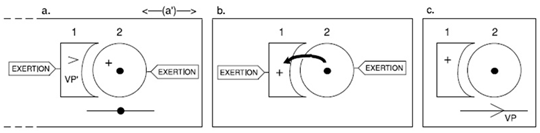
Fonte: Talmy (2000, p.439)
As entidades sencientes engajadas em uma interação de forças dependem, para o suprimento e manutenção de força, de uma psique que gerencie o gasto de força. Na Figura 62(a), observa-se um ANT com uma tendência de força em direção a uma ação, que age sobre um AGO em repouso. Entretanto, uma vez que o AGO tem um equilíbrio de forças mais forte, para o ANT ter sucesso na mudança de estado do AGO, o AGO deve abandonar sua força para haver um deslocamento de grande intensidade do AGO para o ANT (Figura 62(b)). É somente depois do deslocamento da intensidade de força que o ANT pode derrubar o estado do AGO. Assim, na sentença já apresentada (C.3), o sujeito (ele), que está no controle de sua ação, pode reagir a pressão da entidade não-expressa através da decisao de testemunhar na corte. Da mesma forma, o AGO pode manter sua tendência de força durante a interação, resistindo com sucesso a pressão do ANT. A natureza de cada fase da ação é informada pelo conhecimento factivo do falante.
DF e causação
Após uma análise mais detalhada da interação de forças entre as entidades AGO e ANT, Talmy (2000, p. 428) apresenta a DF como um framework capaz de generalizar a noção básica de causação, que tradicionalmente é estudada com base apenas em uma noção uniforme e atômica, representada por “CAUSE”. Resumidamente, o framework da DF permite considerar:
(a) não apenas a noção de “causar”, mas também a de “permitir”;
(b) não apenas os casos prototípicos de causar/permitir, mas também:
- início da provocação de ação (Figura 60(c))
- início da provocação de repouso (Figura 60(d))
- causação estendida da ação (Figura 59(a))
- causação estendida do repouso (Figura 59(d))
- permissão prototípica: início da permissão de ação (Figura 60(a))
- outros tipos de permissão (p.ex. Figura 60(b))
- não apenas os casos em que o ANT é mais forte, mas também os casos em que o ANT é mais fraco.
- não apenas os casos em que o resultado é nomeado, mas também os casos em que a tendência é nomeada.
- não apenas a entidade que afeta (ANT) como sujeito, mas também a entidade afetada (AGO) como sujeito.